繪logo")


全站儀觀測(cè)導(dǎo)線(xiàn)測(cè)量平差方法1 問(wèn)題的提出 隨著全站儀在工程測(cè)量中應(yīng)用的逐漸普及,采用導(dǎo)線(xiàn)作為測(cè)量的平面控制越來(lái)越廣泛,導(dǎo)線(xiàn)一般多布設(shè)成單一導(dǎo)線(xiàn)。應(yīng)用全站儀觀測(cè)導(dǎo)線(xiàn),可以通過(guò)機(jī)內(nèi)的微處理器,直接得到地面點(diǎn)的平面近似坐標(biāo),因此在成果處理時(shí)可以應(yīng)用這些近似坐標(biāo)直接按坐標(biāo)平差(即間接平差)法進(jìn)行平差。這將優(yōu)于過(guò)去導(dǎo)線(xiàn)計(jì)算過(guò)程中先進(jìn)行邊、角平差后,再求取坐標(biāo)的方法。本文主要針對(duì)采用全站儀觀測(cè)導(dǎo)線(xiàn)的近似平差和嚴(yán)密平差方法進(jìn)行探討。 2 導(dǎo)線(xiàn)的近似坐標(biāo)平差 導(dǎo)線(xiàn)測(cè)量用于圖根控制等低精度測(cè)量中,往往采用近似平差即可。由于全站儀直接測(cè)定各導(dǎo)線(xiàn)點(diǎn)的近似坐標(biāo)值,平差計(jì)算就不用像傳統(tǒng)的導(dǎo)線(xiàn)近似平差計(jì)算那樣,先進(jìn)行角度閉合差計(jì)算和調(diào)整,然后推算方位角,再進(jìn)行坐標(biāo)增量閉合差的計(jì)算和調(diào)整,最后根據(jù)平差后的坐標(biāo)增量計(jì)算導(dǎo)線(xiàn)點(diǎn)的坐標(biāo)。全站儀觀測(cè)導(dǎo)線(xiàn)直接按坐標(biāo)平差計(jì)算,將更為簡(jiǎn)便。直接按坐標(biāo)平差法計(jì)算步驟如下:  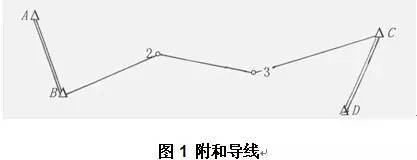  采用坐標(biāo)法進(jìn)行導(dǎo)線(xiàn)近似平差,直接在已經(jīng)測(cè)得導(dǎo)線(xiàn)點(diǎn)的坐標(biāo)上進(jìn)行改正,方法簡(jiǎn)單,易于掌握,避免了傳統(tǒng)近似平差法的方位角的推算和改正,以及坐標(biāo)增量的計(jì)算和改正,能大大提高工作效率,而且不易出錯(cuò)。同時(shí)可以看出傳統(tǒng)附和導(dǎo)線(xiàn)測(cè)量需要兩條已知邊,作為方位角的檢核條件,而直接坐標(biāo)法,只需要一條已知邊和一個(gè)已知點(diǎn)即可,使導(dǎo)線(xiàn)的布網(wǎng)更加靈活。 3 導(dǎo)線(xiàn)的嚴(yán)密坐標(biāo)平差 高等級(jí)平面控制測(cè)量對(duì)精度的要求較高,需要嚴(yán)密平差。全站儀觀測(cè)的導(dǎo)線(xiàn)采用嚴(yán)密坐標(biāo)平差法較為適宜。嚴(yán)密坐標(biāo)平差取待定點(diǎn)的坐標(biāo)平差值作為未知數(shù),通過(guò)平差計(jì)算可直接得到各待定點(diǎn)的坐標(biāo)。但過(guò)去影響應(yīng)用坐標(biāo)平差(間接平差)法的主要原因是輔助計(jì)算量大,尤其是在列立誤差方程之前,需要按近似平差方法將全部導(dǎo)線(xiàn)點(diǎn)的近似坐標(biāo)推算出來(lái);采用全站儀觀測(cè)導(dǎo)線(xiàn),在測(cè)量中可直接得到待定點(diǎn)的近似坐標(biāo),因此不必再解算待定點(diǎn)的近似坐標(biāo)。另一方面坐標(biāo)平差法誤差方程式的列立簡(jiǎn)單且有規(guī)律性,便于編制程序。坐標(biāo)平差法雖然法方程的階數(shù)較高,但利用編制的程序輸入計(jì)算機(jī)中解算,仍是快捷迅速的,這是傳統(tǒng)條件平差無(wú)可比擬的,因此采用坐標(biāo)平差法平差全站儀導(dǎo)線(xiàn)是比較適宜的。 3.1 坐標(biāo)平差中邊、角觀測(cè)值權(quán)的確定 坐標(biāo)平差已是一種成型的平差方法,有關(guān)其原理、計(jì)算公式和計(jì)算步驟等在各種平差文獻(xiàn)中都有較細(xì)的推導(dǎo)和敘述,這里只就應(yīng)用該法平差全站儀觀測(cè)導(dǎo)線(xiàn)過(guò)程中,有關(guān)邊、角權(quán)的確定方法談一點(diǎn)體會(huì)。 3.1.1 邊、角觀測(cè)誤差方程式 坐標(biāo)平差法計(jì)算,首先是列立誤差方程式。導(dǎo)線(xiàn)平差有角度和邊長(zhǎng)兩種類(lèi)型誤差方程式,在圖2中,β為觀測(cè)角度,略去推導(dǎo)過(guò)程,其誤差方程為:  |