繪logo")


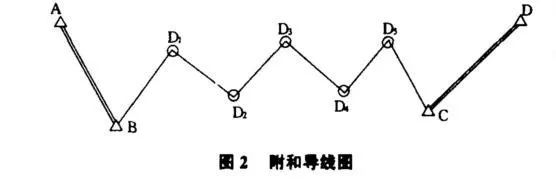
全站儀坐標(biāo)導(dǎo)線測(cè)量及平差方法的比較以附合導(dǎo)線為例,如圖1 所示,A、B、C、D 為已知控制點(diǎn),中間各點(diǎn)為導(dǎo)線點(diǎn),全站儀導(dǎo)線測(cè)量方法如下: 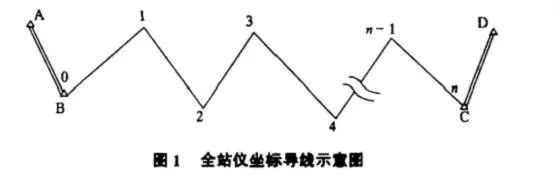 首先將全站儀安置于已知點(diǎn)B上,利用全站儀的三維坐標(biāo)測(cè)量功能和微電腦記憶功能,輸入已知點(diǎn)A、B的三維坐標(biāo)、方位以及儀器和覘標(biāo)高度后,全站儀瞄準(zhǔn)A 點(diǎn)定位,測(cè)記前視導(dǎo)線點(diǎn)2坐標(biāo);然后將儀器移至2 (關(guān)電源) ,繼續(xù)不斷測(cè)記新導(dǎo)線點(diǎn)3、4 ?坐標(biāo)。全站儀將自動(dòng)地顯示各導(dǎo)線點(diǎn)的三維坐標(biāo),并記錄在電子手簿上,而不需內(nèi)業(yè)計(jì)算,直接在現(xiàn)場(chǎng)完成三維導(dǎo)線測(cè)量。 1) 第一種方法稱為坐標(biāo)轉(zhuǎn)換平差法,其基本思想就是:通過坐標(biāo)的旋轉(zhuǎn)、平移和尺度統(tǒng)一等轉(zhuǎn)換方法將帶有觀測(cè)誤差的坐標(biāo)值歸算到平差后的坐標(biāo)值。具體做法是,先根據(jù)導(dǎo)線起點(diǎn)和終點(diǎn)的坐標(biāo)閉合差計(jì)算出坐標(biāo)轉(zhuǎn)換參數(shù),再以求得的轉(zhuǎn)換參數(shù)對(duì)其他導(dǎo)線點(diǎn)的觀測(cè)坐標(biāo)進(jìn)行轉(zhuǎn)換,求得各點(diǎn)的坐標(biāo)改正數(shù),從而求得各導(dǎo)線點(diǎn)的平差坐標(biāo)[ 1 ] 。
4) 第四種方法采用間接平差原理:平差時(shí)取待定點(diǎn)的坐標(biāo)平差值作為未知數(shù),通過平差就直接得到了各待定點(diǎn)的坐標(biāo)平差值。這種平差方法的誤差方程式只有角誤差方程式與邊誤差方程式兩種類型。在全部列出角、邊誤差方程式并檢核無(wú)誤后,即可按一般的間接平差步驟計(jì)算待定點(diǎn)坐標(biāo)平差值[ 4 ] 。 這四種方法,第二種平差方法較適用于直伸形導(dǎo)線,而對(duì)于曲折形導(dǎo)線其平差結(jié)果的誤差較大;第三種平差方法對(duì)于完整的附和導(dǎo)線才能采用;第四種平差方法列立方程以及計(jì)算比較繁瑣。而第一種平差方法的數(shù)學(xué)模型簡(jiǎn)單易懂,計(jì)算只需簡(jiǎn)單的四則運(yùn)算。下面簡(jiǎn)單敘述一下方法1) 的公式推導(dǎo)過程:
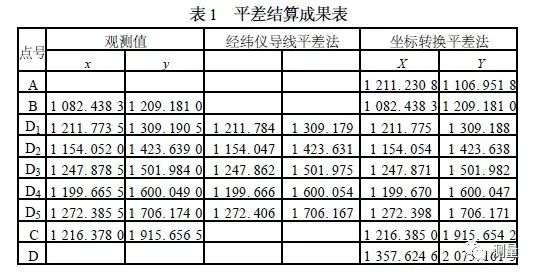
如圖2 所示,分別采用經(jīng)緯儀導(dǎo)線測(cè)量方法和全站儀坐標(biāo)導(dǎo)線測(cè)量方法進(jìn)行測(cè)量,A、B、C、D 為已知控制點(diǎn),D1、D2、D3、D4、D5為待測(cè)導(dǎo)線點(diǎn),分別按坐標(biāo)轉(zhuǎn)換法平差、經(jīng)緯儀導(dǎo)線平差法計(jì)算導(dǎo)線各點(diǎn)的坐標(biāo)平差值,結(jié)果見表1 。
|