繪logo")


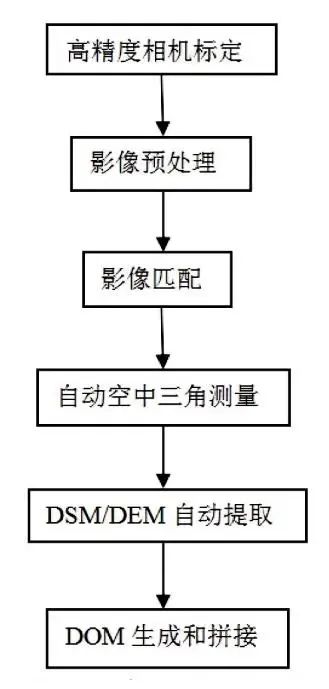
東英測(cè)繪——【干貨】無人機(jī)傾斜攝影測(cè)量內(nèi)業(yè)數(shù)據(jù)處理流程詳解(上)一、內(nèi)業(yè)三維建模 在外業(yè)航空攝影作業(yè)完成以后,需要及時(shí)將數(shù)據(jù)導(dǎo)出然后轉(zhuǎn)入內(nèi)業(yè)處理,內(nèi)容如下 (1)數(shù)據(jù)檢查 主要進(jìn)行航空攝影的檢查飛行質(zhì)量以及航拍影像質(zhì)量,比如實(shí)際的影像重疊度、像片傾角和旋角、航線彎曲度,攝區(qū)覆蓋范圍、影像的清晰度以及像點(diǎn)位移等。如果檢查內(nèi)容不能夠滿足內(nèi)業(yè)規(guī)范和作業(yè)任務(wù)的要求,則應(yīng)該根據(jù)實(shí)際情況重新擬定飛行計(jì)劃對(duì)局部區(qū)域補(bǔ)飛或者重飛。 (2)空三加密 在目前無人機(jī)的傾斜攝影測(cè)量內(nèi)業(yè)數(shù)據(jù)處理的過程之中,通常會(huì)采用光束法區(qū)域網(wǎng)聯(lián)合平差的方法,也稱為聯(lián)合平差。聯(lián)合平差的基本原理是對(duì)運(yùn)用兩種不同觀測(cè)手段得到的數(shù)據(jù)進(jìn)行平差,將控制點(diǎn)坐標(biāo)數(shù)據(jù)與像片的POS姿態(tài)數(shù)據(jù)作為外方位元素的初始值進(jìn)行聯(lián)合平差。 (3)實(shí)景三維模型建立 基于原始影像以及空三成果,即能夠使用Pix4Dmapper等內(nèi)業(yè)處理軟件生成三維模型及派生數(shù)據(jù),包括DOM、DSM(含DEM)以及密集點(diǎn)云等數(shù)據(jù)。 二、內(nèi)業(yè)數(shù)據(jù)采集 當(dāng)實(shí)景三維模型生產(chǎn)完成以后,應(yīng)該使用像控點(diǎn)以及檢查點(diǎn)對(duì)模型精度進(jìn)行檢查。模型精度符合相關(guān)規(guī)范要求后,采用相關(guān)數(shù)據(jù)采集平臺(tái),進(jìn)行地形數(shù)據(jù)的采集,作業(yè)模式采用先內(nèi)后外的模式生產(chǎn)。 三、處理流程 垂直攝影測(cè)量處理流程圖:
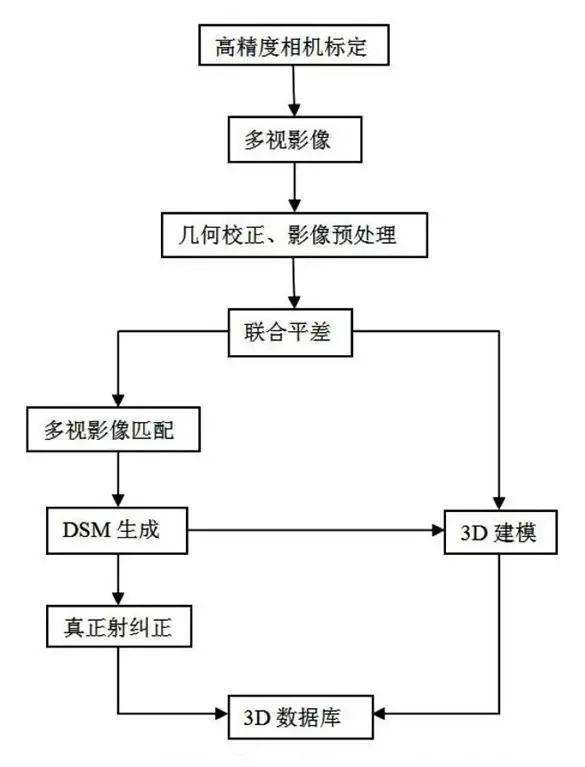
傾斜攝影測(cè)量處理流程:
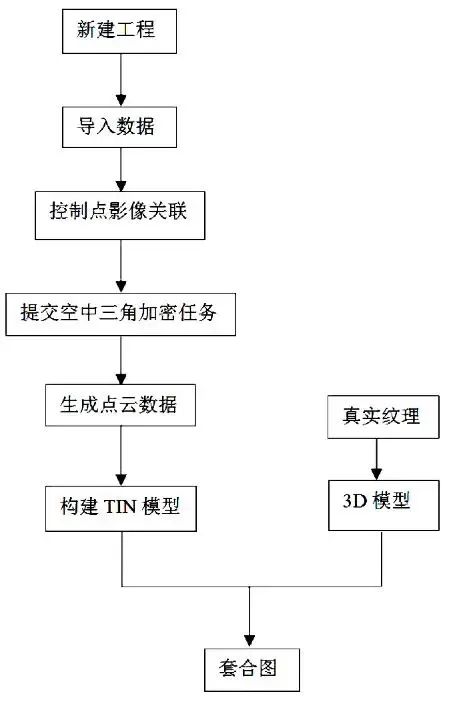
3D模型構(gòu)建流程:
四、成果輸出 根據(jù)項(xiàng)目的要求采集完畢之后進(jìn)行數(shù)據(jù)的檢查,再使用軟件進(jìn)行數(shù)據(jù)的生產(chǎn),然后整合成FDB格式成果,最后保存為DWG或DXF格式的文件進(jìn)行輸出。
|
 以上就是無人機(jī)傾斜攝影測(cè)量內(nèi)業(yè)數(shù)據(jù)處理流程詳解,如果你還有什么不了解的地方,歡迎留言或者在線咨詢,我們會(huì)及時(shí)與您聯(lián)系。東英測(cè)繪儀器有限公司提供RTK/GPS、全站儀、水準(zhǔn)儀、經(jīng)緯儀、無人機(jī)等儀器的銷售、檢測(cè)、校正等服務(wù),也承接測(cè)繪培訓(xùn)和各種內(nèi)外業(yè)測(cè)量任務(wù),有相關(guān)的需要了解都可以留言或者在線咨詢我們,我們將詳細(xì)為你解答。
以上就是無人機(jī)傾斜攝影測(cè)量內(nèi)業(yè)數(shù)據(jù)處理流程詳解,如果你還有什么不了解的地方,歡迎留言或者在線咨詢,我們會(huì)及時(shí)與您聯(lián)系。東英測(cè)繪儀器有限公司提供RTK/GPS、全站儀、水準(zhǔn)儀、經(jīng)緯儀、無人機(jī)等儀器的銷售、檢測(cè)、校正等服務(wù),也承接測(cè)繪培訓(xùn)和各種內(nèi)外業(yè)測(cè)量任務(wù),有相關(guān)的需要了解都可以留言或者在線咨詢我們,我們將詳細(xì)為你解答。