如何使用DJI 精靈4Pro無人機(jī)制作高精度地圖跟三維模型網(wǎng)址:http://m.91lanmei.com/ 之前,人們不得不花費(fèi)10多萬元購買專業(yè)測繪無人機(jī),并在地面上放置大量控制點(diǎn),以獲得準(zhǔn)確、測量級的地圖。隨著電腦技術(shù),相機(jī)技術(shù),無人機(jī)技術(shù)的發(fā)展,DJI的精靈系列迅速占領(lǐng)了很大一部分市場。下面小編介紹一種使用精靈4Pro,搭載云帆創(chuàng)新 GAMA PPK的無人機(jī)航測解決方案,以顯著降低控制點(diǎn),并解釋工作流程、測試方法以及結(jié)果的精度驗證。
一、介紹: 精靈P4 Pro(P4P)是一種技術(shù)成熟,經(jīng)濟(jì)高效的消費(fèi)級無人機(jī),在市場上很受歡迎。它靈活、操作簡單,價格便宜,以及攝像機(jī)微秒同步和無用戶校準(zhǔn),特別適用于密集建成的城市和地形復(fù)雜的區(qū)域。
我們搭載云帆創(chuàng)新的無損安裝PPK套件,可以為P4P 提供高精度的位置信息,而且PPK采用的靜態(tài)后差分的模式,跟基站之間不需要實(shí)時鏈接,是避免在城市和沒有 4G 信號覆蓋的區(qū)域經(jīng)常發(fā)生的校正中斷的更可靠的方法,同時采用前算,后算的組合運(yùn)算的方式,可以提供比實(shí)時更高的精度。
DJI P4P PPK飛機(jī)主要由以下幾個部分組成:
1. 無人機(jī)平臺包含: DJI P4P無人機(jī),云臺,相機(jī),遙控器,電池及充電器。 2. 云帆創(chuàng)新Gama PPK套件包含:PPK接收機(jī)一臺 ,航空螺旋天線一個。 3. PPK 基站:采用司南導(dǎo)航T300 作為靜態(tài)基站,采樣率設(shè)置為5Hz,記錄靜態(tài)數(shù)據(jù),來讓PPK軟件處理,同時T300可以作為RTK流動站測量靜態(tài)基站坐標(biāo)跟檢查點(diǎn)的坐標(biāo)。 4. PPK后處理軟件:RTKPost 是一款PPK后處理軟件,可以處理云帆創(chuàng)新GAMA的數(shù)據(jù),跟司南T300的數(shù)據(jù),獲取到2cm以內(nèi)的pos坐標(biāo),同時添加相機(jī)跟天線的X Y Z 的偏差,輸出結(jié)果給照片的時間跟高精度的位置,成果可以直接運(yùn)用到后期的圖像處理軟件中。
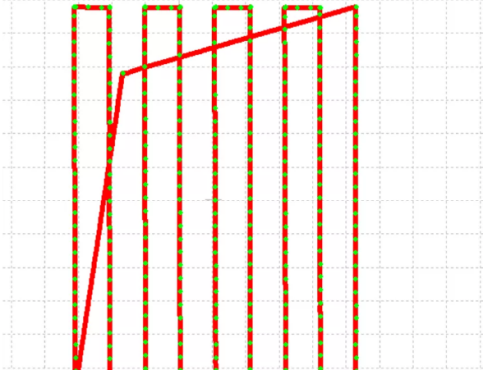
二、數(shù)據(jù)采集 我們客戶選取了一個野外的礦區(qū),進(jìn)行數(shù)據(jù)采集,主要過程分為三個步驟: 1.野外數(shù)據(jù)采集:在飛行區(qū)域內(nèi)測量了5個RTK檢查點(diǎn),外加一個基站坐標(biāo),來驗證沒有控制點(diǎn)的情況下P4P的精度。 2.測量檢測點(diǎn)的坐標(biāo)。 3.PPK數(shù)據(jù)處理:軟件一鍵化生成高精度的照片pos文件。
三、圖像處理: 現(xiàn)在有很多的圖像處理軟件,可以用來處理數(shù)據(jù),如pix4d mapper, metashape,Inpho,大疆疆圖等,這些軟件的功能基本類似,選取pix4d mapper 對數(shù)據(jù)進(jìn)行驗證。處理主要分為三個步驟:
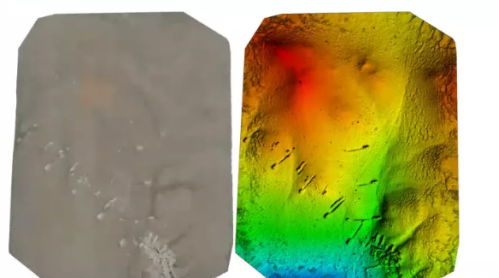
1、初始化處理:創(chuàng)建工程,添加照片,選擇坐標(biāo)系導(dǎo)入POS,導(dǎo)入檢查點(diǎn) ,然后進(jìn)行初始化處理: (1)關(guān)鍵點(diǎn)提取:將特定特征標(biāo)識為圖像中的關(guān)鍵點(diǎn) (2)關(guān)鍵點(diǎn)匹配:查找哪些圖像具有相同的關(guān)鍵點(diǎn)并匹配他們 (3)相機(jī)優(yōu)化:相機(jī)畸變參數(shù)優(yōu)化 2、生成點(diǎn)云: 3、 生成DOM和DSM
四、精度驗證: 我們通過給普通消費(fèi)品的DJI P4P無人機(jī)添加PPK差分模塊,經(jīng)過以上分析不添加控制點(diǎn)的情況下,水平可以達(dá)到10cm以內(nèi)的精度,高程可以達(dá)到30cm左右的精度,能滿足大部分的要求,由此可見云帆創(chuàng)新的GAMA PPK模塊是一種低成本的,高效的PPK方案! |